

地鐵在地下有彎道看不見前方是如何實現安全運行的呢?如何知曉前方列車的位置,避免追尾事故發生?相信很多鐵粉都有這樣的疑問。地鐵是如何在地下實現安全運行的?
以前在電氣設備還不夠完善的時候,地鐵列車運行一般是依靠人為的進行安全卡控。使用“站間閉塞方法”行車,它是由區間的兩端車站值班員確認區間空閑后進行接發列車。保證一個區間只有一列車在里面運行,從而避免事故的發生。
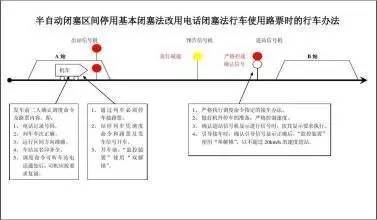
這種方法雖然安全,但對列車的運行時間卻影響較大,完全滿足不了現在地鐵系統的時間要求。地鐵列車運行一個區間大概需要2分鐘左右,但長大區間卻要五分鐘左右,在“站間閉塞法”的情況下,后站列車得等上3分鐘才可以再發車,大大的延緩了地鐵運營。所以隨著電氣設備的相繼完善。這種閉塞方式便成為了備用模式,取而代之的是”移動閉塞“!
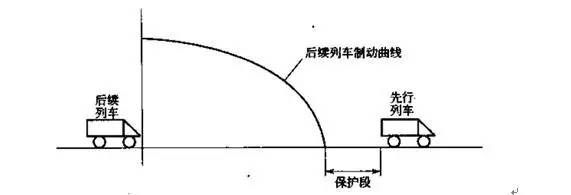
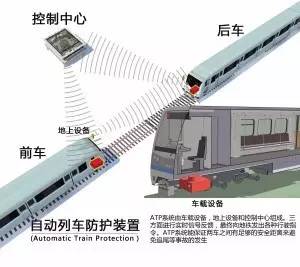
移動閉塞的出現,縮短了列車運營時間,其不再受到空間的限制,在移動閉塞模式下后車可根據記軸器、軌旁等設備,自動檢測前方列車的位置,通過列車司機室內信號屏直觀的顯示給司機,地下彎道等阻礙司機瞭望前車的影響就不存在了。同時,在智能系統的幫助下,列車會自動設置一個與前車之間的安全距離,根據前車的運行速度而進行相應改變,并規劃減速距離和停車位置,保證在列車停下后與前方列車的安全距離足夠,智能系統還具有自動停車功能,在司機未控制好速度時,列車會立即采取緊急停車措施避免發生追尾事故。

除了智能系統保證地鐵在地下完全運行以外,還有這樣一群人在幕后保駕護航,他們是”行車調度員“,他們通過信號系統實時的反饋,關注著每列車的位置,同時用電臺告知司機并進行相應的調控。
在信號系統發達的今天,地鐵在地下運行是相當安全的。
相關鏈接


 滬公網安備31011502010460號
滬公網安備31011502010460號

